Item Description
Item Description
Planetary Equipment Stepping Motor :
Precision high-end upgrade with Nema8, Nema 11, Nema14, Nema 17, Nema23, Nema 24
stepper motor low noise, low vibration, firm and durable. Increase torque at low speed.
Reduction ratio:1:3.7 , 1:5.2 , 1:14 , 1:19 ,1:27 ,1:51 , 1:71 ,1:100 ,1:139 , 1:189 ,1:264 , 1:369 ,And 48 hours delivery , in stock .
Software:
Automation control, medical equipment, textile machinery,and packaging machinery fields. Not only in the field of the automation industry, it also has a good use status in the home. Products with low speed and inertia are often seen: electric curtains, electric shutters, etc
Solution Parameters
Planetary Equipment Box Specification:
| Housing Content | Metallic |
| Bearing at Output | Ball Bearings |
| Max.Radial Load(10mm from flange) | 200N |
| Max.Shaft Axial Load | 100N |
| Radial Play of Shaft (near to Flange) | ≤0.06mm |
| Axial Play of Shaft | ≤0.3mm |
| Backlash at No-load | 1 stage≤1°,2stage≤1.2°,3stage≤1.5° |
42HS Hybrid Stepping Motor Specs:
| Model No. | Step Angle | Motor Duration(L1) | Rated | Recent | Resistance | Inductance | Holding Torque | # of Leads | Rotor Inertia | Mass | Max.Equipment Ratio |
| Voltage | /Section | /Stage | /Stage | ||||||||
| Single Shaft | ( °) | (L)mm | V | A | Ω | mH | mN.m | No. | g.cm2 | Kg | |
| 42HSC1409 | 1.8 | 34 | two.ninety three | one.33 | 2.2 | three.five | 270 | four | 30 | .22 | ≤1:369 |
| 42HSC4409 | 1.eight | 40 | two.five | 1.five | one.65 | three.three | 380 | 4 | forty | .3 | ≤1:369 |
| 42HSC1409 Planetary Gearbox Technical specs: | ||||||||||||
| Reduction ratio | three.71 | five.eighteen | fourteen | 19 | 27 | fifty one | seventy one | one hundred | 139 | 189 | 264 | 369 |
| Overall Top(L1+L2) (mm) | 65.five | 65.five | seventy six.1 | 76.1 | 76.one | 86.five | 86.five | 86.five | 86.5 | ninety six.9 | 96.nine | ninety six.nine |
| Output torque ( mN.m) | 902 | 1259 | 3062 | 4155 | 5000 | 10000 | 10000 | ten thousand | 10000 | ten thousand | 10000 | 10000 |
| Whole Bodyweight(g) | 428 | 428 | 510 | 510 | 510 | 592 | 592 | 592 | 592 | 674 | 674 | 674 |
| Quantity of gear trains | 1 | 2 | 3 | 4 | ||||||||
| Reducer Duration(L2) (mm) | 31.five | 42.1 | 52.5 | 62.nine | ||||||||
| Efficiency | 90% | 81% | 73% | 66% | ||||||||
| 42HSC4409 Planetary Gearbox Requirements: | ||||||||||||
| Reduction ratio | three.71 | 5.18 | 14 | 19 | 27 | fifty one | 71 | a hundred | 139 | 189 | 264 | 369 |
| Overall Height(L1+L2) (mm) | 71.5 | 71.five | 82.1 | 82.1 | 82.one | 92.five | ninety two.five | 92.5 | ninety two.five | 102.9 | 102.nine | 102.nine |
| Output torque ( mN.m) | 1269 | 1772 | 4309 | 5000 | 5000 | ten thousand | ten thousand | ten thousand | ten thousand | 10000 | ten thousand | ten thousand |
| Total Weight(g) | 508 | 508 | 590 | 590 | 590 | 672 | 672 | 672 | 672 | 754 | 754 | 754 |
| Amount of equipment trains | 1 | 2 | 3 | 4 | ||||||||
| Reducer Size(L2) (mm) | 31.five | 42.one | 52.five | 62.nine | ||||||||
| Effectiveness | 90% | 81% | 73% | 66% | ||||||||
Comprehensive Photos
Business Profile
ZheJiang UMot Technology Co., Ltd. specializes in R&D and income of stepper motors, servo motors, linear modules and related movement handle merchandise, customizing and creating higher-top quality motor items for consumers with unique requirements close to the entire world, and providing general solutions for motion manage methods. Merchandise are exported to much more than thirty international locations and locations like the United States, Germany, France, Italy, Russia, and Switzerland. The firm’s main goods and technique design and style have been extensively utilized in automation handle, precision instruments, health care products, intelligent property, 3D printing and many other fields.
Our business has been acknowledged as a large-tech organization by pertinent departments, has a full good quality management technique, has acquired ISO9001, CE, RoHs and other relevant certifications, and retains a quantity of electrical patent certificates. “Focus, Professionalism, Focus” in the discipline of automation of motor R&D and method management answers is the company’s organization purpose. “Be your most reliable companion” is the firm’s service philosophy. We have always been aiming to “make very first-class items with specialist technological innovation”, maintain tempo with the moments, innovate continually, and give more users with far better items and providers.
FAQ
one. Shipping and delivery method:
1)Intercontinental Express shipping and delivery DHL&FEDEX &UPS&TNT& 7-10days
2)Transport by air 7-10 times
three)delivery by sea, shipping time relies upon on the spot port.
2. Specialized Assistance:
We can supply you with specialist technological help. And our items top quality promise is 6 months. Also, we acknowledge items custom-made.
three. Why need to you purchase from us, not from other suppliers?
Skilled one particular-to-1 motor customized. The world’s massive company of selection for higher-good quality suppliers. ISO9001:2008 quality management technique certification, by way of the CE, ROHS certification.
four. How to decide on models?
Before acquiring, you should speak to us to affirm design No. and requirements to stay away from any misunderstanding.
five. Are you a manufacturing unit?
Indeed, we are a manufacturing facility, and we produce stepper motor/driver, Servo motor/driver.
|
US $31.2-54.68 / Piece | |
1 Piece (Min. Order) |
###
| Application: | Robot |
|---|---|
| Speed: | Low Speed |
| Number of Stator: | Two-Phase |
| Excitation Mode: | HB-Hybrid |
| Function: | Control, Driving |
| Number of Poles: | 2 |
###
| Samples: |
US$ 42/Piece
1 Piece(Min.Order) |
|---|
###
| Customization: |
Available
|
|---|
###
| Housing Material | Metal |
| Bearing at Output | Ball Bearings |
| Max.Radial Load(10mm from flange) | 200N |
| Max.Shaft Axial Load | 100N |
| Radial Play of Shaft (near to Flange) | ≤0.06mm |
| Axial Play of Shaft | ≤0.3mm |
| Backlash at No-load | 1 stage≤1°,2stage≤1.2°,3stage≤1.5° |
###
| Model No. | Step Angle | Motor Length(L1) | Rated | Current | Resistance | Inductance | Holding Torque | # of Leads | Rotor Inertia | Mass | Max.Gear Ratio |
| Voltage | /Phase | /Phase | /Phase | ||||||||
| Single Shaft | ( °) | (L)mm | V | A | Ω | mH | mN.m | No. | g.cm2 | Kg | |
| 42HSC1409 | 1.8 | 34 | 2.93 | 1.33 | 2.2 | 3.5 | 270 | 4 | 30 | 0.22 | ≤1:369 |
| 42HSC4409 | 1.8 | 40 | 2.5 | 1.5 | 1.65 | 3.3 | 380 | 4 | 40 | 0.3 | ≤1:369 |
###
| 42HSC1409 Planetary Gearbox Specifications: | ||||||||||||
| Reduction ratio | 3.71 | 5.18 | 14 | 19 | 27 | 51 | 71 | 100 | 139 | 189 | 264 | 369 |
| Total Height(L1+L2) (mm) | 65.5 | 65.5 | 76.1 | 76.1 | 76.1 | 86.5 | 86.5 | 86.5 | 86.5 | 96.9 | 96.9 | 96.9 |
| Output torque ( mN.m) | 902 | 1259 | 3062 | 4155 | 5000 | 10000 | 10000 | 10000 | 10000 | 10000 | 10000 | 10000 |
| Total Weight(g) | 428 | 428 | 510 | 510 | 510 | 592 | 592 | 592 | 592 | 674 | 674 | 674 |
| Number of gear trains | 1 | 2 | 3 | 4 | ||||||||
| Reducer Length(L2) (mm) | 31.5 | 42.1 | 52.5 | 62.9 | ||||||||
| Efficiency | 90% | 81% | 73% | 66% | ||||||||
###
| 42HSC4409 Planetary Gearbox Specifications: | ||||||||||||
| Reduction ratio | 3.71 | 5.18 | 14 | 19 | 27 | 51 | 71 | 100 | 139 | 189 | 264 | 369 |
| Total Height(L1+L2) (mm) | 71.5 | 71.5 | 82.1 | 82.1 | 82.1 | 92.5 | 92.5 | 92.5 | 92.5 | 102.9 | 102.9 | 102.9 |
| Output torque ( mN.m) | 1269 | 1772 | 4309 | 5000 | 5000 | 10000 | 10000 | 10000 | 10000 | 10000 | 10000 | 10000 |
| Total Weight(g) | 508 | 508 | 590 | 590 | 590 | 672 | 672 | 672 | 672 | 754 | 754 | 754 |
| Number of gear trains | 1 | 2 | 3 | 4 | ||||||||
| Reducer Length(L2) (mm) | 31.5 | 42.1 | 52.5 | 62.9 | ||||||||
| Efficiency | 90% | 81% | 73% | 66% | ||||||||
|
US $31.2-54.68 / Piece | |
1 Piece (Min. Order) |
###
| Application: | Robot |
|---|---|
| Speed: | Low Speed |
| Number of Stator: | Two-Phase |
| Excitation Mode: | HB-Hybrid |
| Function: | Control, Driving |
| Number of Poles: | 2 |
###
| Samples: |
US$ 42/Piece
1 Piece(Min.Order) |
|---|
###
| Customization: |
Available
|
|---|
###
| Housing Material | Metal |
| Bearing at Output | Ball Bearings |
| Max.Radial Load(10mm from flange) | 200N |
| Max.Shaft Axial Load | 100N |
| Radial Play of Shaft (near to Flange) | ≤0.06mm |
| Axial Play of Shaft | ≤0.3mm |
| Backlash at No-load | 1 stage≤1°,2stage≤1.2°,3stage≤1.5° |
###
| Model No. | Step Angle | Motor Length(L1) | Rated | Current | Resistance | Inductance | Holding Torque | # of Leads | Rotor Inertia | Mass | Max.Gear Ratio |
| Voltage | /Phase | /Phase | /Phase | ||||||||
| Single Shaft | ( °) | (L)mm | V | A | Ω | mH | mN.m | No. | g.cm2 | Kg | |
| 42HSC1409 | 1.8 | 34 | 2.93 | 1.33 | 2.2 | 3.5 | 270 | 4 | 30 | 0.22 | ≤1:369 |
| 42HSC4409 | 1.8 | 40 | 2.5 | 1.5 | 1.65 | 3.3 | 380 | 4 | 40 | 0.3 | ≤1:369 |
###
| 42HSC1409 Planetary Gearbox Specifications: | ||||||||||||
| Reduction ratio | 3.71 | 5.18 | 14 | 19 | 27 | 51 | 71 | 100 | 139 | 189 | 264 | 369 |
| Total Height(L1+L2) (mm) | 65.5 | 65.5 | 76.1 | 76.1 | 76.1 | 86.5 | 86.5 | 86.5 | 86.5 | 96.9 | 96.9 | 96.9 |
| Output torque ( mN.m) | 902 | 1259 | 3062 | 4155 | 5000 | 10000 | 10000 | 10000 | 10000 | 10000 | 10000 | 10000 |
| Total Weight(g) | 428 | 428 | 510 | 510 | 510 | 592 | 592 | 592 | 592 | 674 | 674 | 674 |
| Number of gear trains | 1 | 2 | 3 | 4 | ||||||||
| Reducer Length(L2) (mm) | 31.5 | 42.1 | 52.5 | 62.9 | ||||||||
| Efficiency | 90% | 81% | 73% | 66% | ||||||||
###
| 42HSC4409 Planetary Gearbox Specifications: | ||||||||||||
| Reduction ratio | 3.71 | 5.18 | 14 | 19 | 27 | 51 | 71 | 100 | 139 | 189 | 264 | 369 |
| Total Height(L1+L2) (mm) | 71.5 | 71.5 | 82.1 | 82.1 | 82.1 | 92.5 | 92.5 | 92.5 | 92.5 | 102.9 | 102.9 | 102.9 |
| Output torque ( mN.m) | 1269 | 1772 | 4309 | 5000 | 5000 | 10000 | 10000 | 10000 | 10000 | 10000 | 10000 | 10000 |
| Total Weight(g) | 508 | 508 | 590 | 590 | 590 | 672 | 672 | 672 | 672 | 754 | 754 | 754 |
| Number of gear trains | 1 | 2 | 3 | 4 | ||||||||
| Reducer Length(L2) (mm) | 31.5 | 42.1 | 52.5 | 62.9 | ||||||||
| Efficiency | 90% | 81% | 73% | 66% | ||||||||
What Is a Gear Motor?
A gear motor is an electric motor coupled with a gear train. It uses either DC or AC power to achieve its purpose. The primary benefit of a gear reducer is its ability to multiply torque while maintaining a compact size. The trade-off of this additional torque comes in the form of a reduced output shaft speed and overall efficiency. However, proper gear technology and ratios provide optimum output and speed profiles. This type of motor unlocks the full potential of OEM equipment.
Inertial load
Inertial load on a gear motor is the amount of force a rotating device produces due to its inverse square relationship with its inertia. The greater the inertia, the less torque can be produced by the gear motor. However, if the inertia is too high, it can cause problems with positioning, settling time, and controlling torque and velocity. Gear ratios should be selected for optimal power transfer.
The duration of acceleration and braking time of a gear motor depends on the type of driven load. An inertia load requires longer acceleration time whereas a friction load requires breakaway torque to start the load and maintain it at its desired speed. Too short a time period can cause excessive gear loading and may result in damaged gears. A safe approach is to disconnect the load when power is disconnected to prevent inertia from driving back through the output shaft.
Inertia is a fundamental concept in the design of motors and drive systems. The ratio of mass and inertia of a load to a motor determines how well the motor can control its speed during acceleration or deceleration. The mass moment of inertia, also called rotational inertia, is dependent on the mass, geometry, and center of mass of an object.
Applications
There are many applications of gear motors. They provide a powerful yet efficient means of speed and torque control. They can be either AC or DC, and the two most common motor types are the three-phase asynchronous and the permanent magnet synchronous servomotor. The type of motor used for a given application will determine its cost, reliability, and complexity. Gear motors are typically used in applications where high torque is required and space or power constraints are significant.
There are two types of gear motors. Depending on the ratio, each gear has an output shaft and an input shaft. Gear motors use hydraulic pressure to produce torque. The pressure builds on one side of the motor until it generates enough torque to power a rotating load. This type of motors is not recommended for applications where load reversals occur, as the holding torque will diminish with age and shaft vibration. However, it can be used for precision applications.
The market landscape shows the competitive environment of the gear motor industry. This report also highlights key items, income and value creation by region and country. The report also examines the competitive landscape by region, including the United States, China, India, the GCC, South Africa, Brazil, and the rest of the world. It is important to note that the report contains segment-specific information, so that readers can easily understand the market potential of the geared motors market.
Size
The safety factor, or SF, of a gear motor is an important consideration when selecting one for a particular application. It compensates for the stresses placed on the gearing and enables it to run at maximum efficiency. Manufacturers provide tables detailing typical applications, with multiplication factors for duty. A gear motor with a SF of three or more is suitable for difficult applications, while a gearmotor with a SF of one or two is suitable for relatively easy applications.
The global gear motor market is highly fragmented, with numerous small players catering to various end-use industries. The report identifies various industry trends and provides comprehensive information on the market. It outlines historical data and offers valuable insights on the industry. The report also employs several methodologies and approaches to analyze the market. In addition to providing historical data, it includes detailed information by market segment. In-depth analysis of market segments is provided to help identify which technologies will be most suitable for which applications.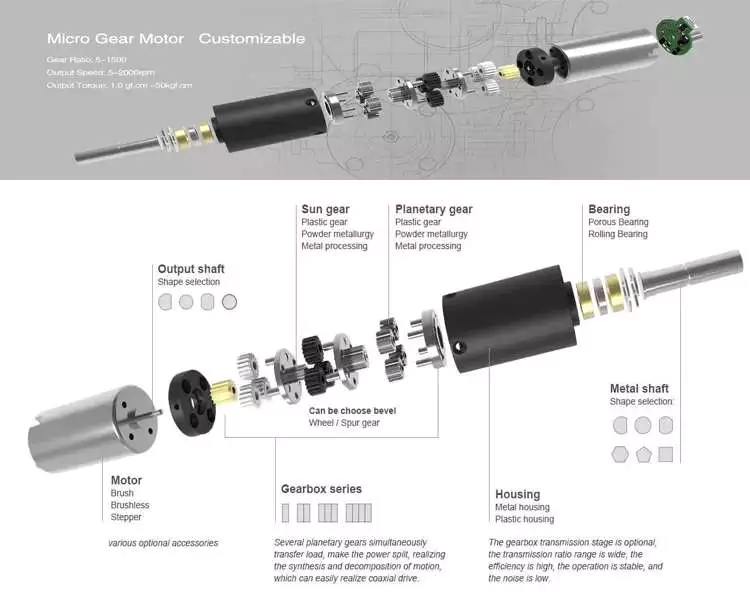
Cost
A gear motor is an electric motor that is paired with a gear train. They are available in AC or DC power systems. Compared to conventional motors, gear reducers can maximize torque while maintaining compact dimensions. But the trade-off is the reduced output shaft speed and overall efficiency. However, when used correctly, a gear motor can produce optimal output and mechanical fit. To understand how a gear motor works, let’s look at two types: right-angle geared motors and inline geared motors. The first two types are usually used in automation equipment and in agricultural and medical applications. The latter type is designed for rugged applications.
In addition to its efficiency, DC gear motors are space-saving and have low energy consumption. They can be used in a number of applications including money counters and printers. Automatic window machines and curtains, glass curtain walls, and banknote vending machines are some of the other major applications of these motors. They can cost up to 10 horsepower, which is a lot for an industrial machine. However, these are not all-out expensive.
Electric gear motors are versatile and widely used. However, they do not work well in applications requiring high shaft speed and torque. Examples of these include conveyor drives, frozen beverage machines, and medical tools. These applications require high shaft speed, so gear motors are not ideal for these applications. However, if noise and other problems are not a concern, a motor-only solution may be the better choice. This way, you can use a single motor for multiple applications.
Maintenance
Geared motors are among the most common equipment used for drive trains. Proper maintenance can prevent damage and maximize their efficiency. A guide to gear motor maintenance is available from WEG. To prevent further damage, follow these maintenance steps:
Regularly check electrical connections. Check for loose connections and torque them to the recommended values. Also, check the contacts and relays to make sure they are not tangled or damaged. Check the environment around the gear motor to prevent dust from clogging the passageway of electric current. A proper maintenance plan will help you identify problems and extend their life. The manual will also tell you about any problems with the gearmotor. However, this is not enough – it is important to check the condition of the gearbox and its parts.
Conduct visual inspection. The purpose of visual inspection is to note any irregularities that may indicate possible problems with the gear motor. A dirty motor may be an indication of a rough environment and a lot of problems. You can also perform a smell test. If you can smell a burned odor coming from the windings, there may be an overheating problem. Overheating can cause the windings to burn and damage.
Reactive maintenance is the most common method of motor maintenance. In this type of maintenance, you only perform repairs if the motor stops working due to a malfunction. Regular inspection is necessary to avoid unexpected motor failures. By using a logbook to document motor operations, you can determine when it is time to replace the gear motor. In contrast to preventive maintenance, reactive maintenance requires no regular tests or services. However, it is recommended to perform inspections every six months.


editor by czh 2022-12-15